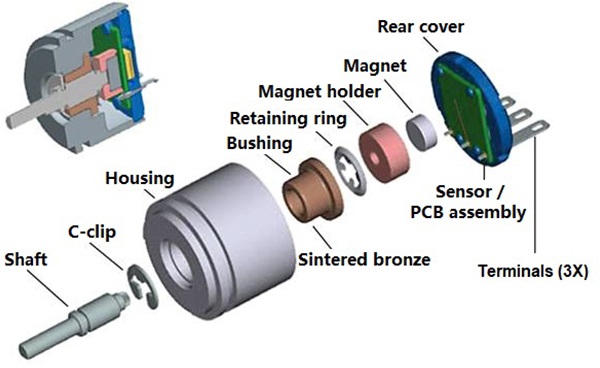
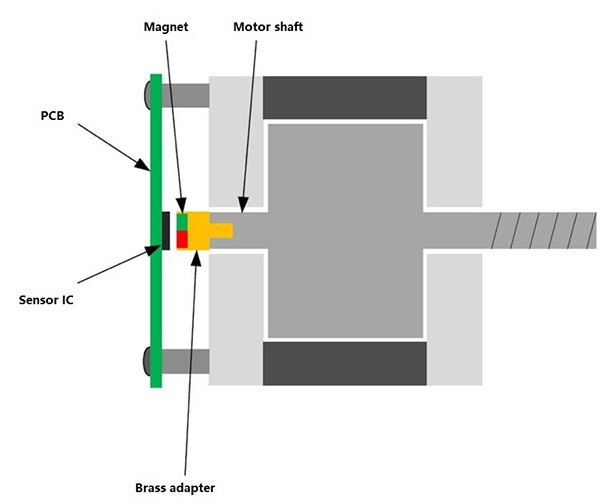
જો તમારી પાસે ચુંબકીય રોટરી એન્કોડરને ડિસએસેમ્બલ કરવાની તક હોય, તો તમે સામાન્ય રીતે ઉપર બતાવેલ જેવું આંતરિક માળખું જોશો. ચુંબકીય એન્કોડર યાંત્રિક શાફ્ટ, શેલ સ્ટ્રક્ચર, એન્કોડરના અંતે પીસીબી એસેમ્બલી અને નાનાડિસ્ક ચુંબકયાંત્રિક શાફ્ટના અંતે શાફ્ટ સાથે ફરતી.
ચુંબકીય એન્કોડર પરિભ્રમણ સ્થિતિ પ્રતિસાદને કેવી રીતે માપે છે?
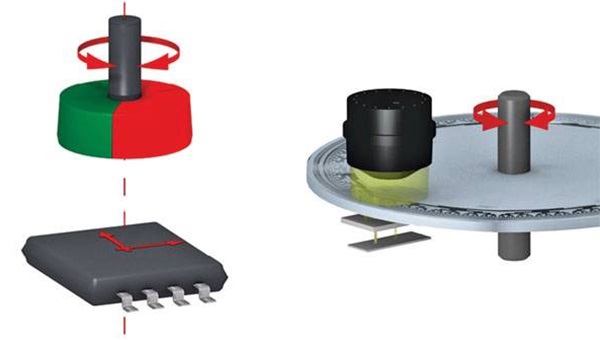
હોલ ઇફેક્ટ: ઇલેક્ટ્રિક પ્રવાહ વહન કરતા વાહકમાં સંભવિત તફાવતનું ઉત્પાદન જ્યારે ચુંબકીય ક્ષેત્રને પ્રવાહના પ્રવાહની લંબ દિશામાં લાગુ કરવામાં આવે છે.
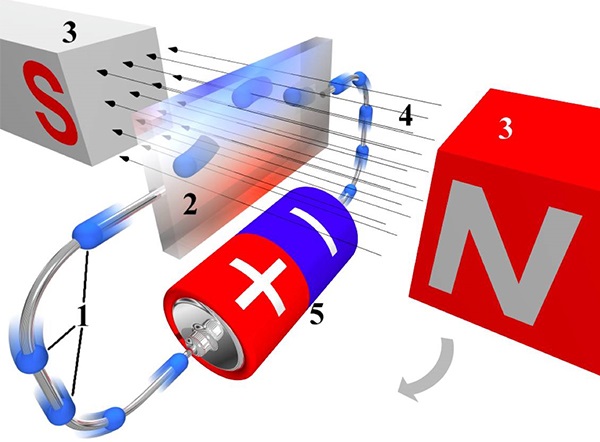
જો કંડક્ટર પર લાગુ ચુંબકીય ક્ષેત્રને ધરી તરીકે વર્તમાન પ્રવાહ માર્ગ સાથે ઉપરના તીર દ્વારા બતાવેલ દિશામાં ફેરવવામાં આવે છે, તો ચુંબકીય ક્ષેત્ર અને વાહક વચ્ચેના કોણના ફેરફારને કારણે હોલ સંભવિત તફાવત બદલાશે, અને સંભવિત તફાવતનું પરિવર્તન વલણ એ sinusoidal વળાંક છે. તેથી, ઉત્સાહિત વાહકની બંને બાજુઓ પરના વોલ્ટેજના આધારે, ચુંબકીય ક્ષેત્રના પરિભ્રમણ કોણની ઉલટી ગણતરી કરી શકાય છે. પરિભ્રમણ સ્થિતિ પ્રતિસાદને માપતી વખતે આ ચુંબકીય એન્કોડરની મૂળભૂત કાર્ય પદ્ધતિ છે.
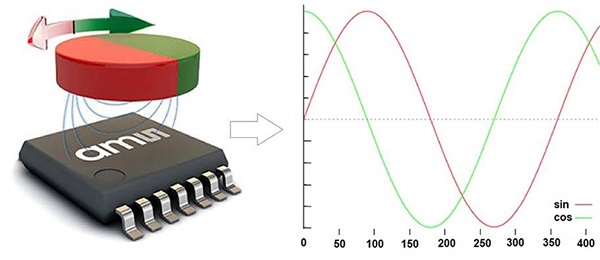
રિઝોલ્વર પરસ્પર લંબરૂપ આઉટપુટ કોઇલના બે સેટનો ઉપયોગ કરે છે તે સિદ્ધાંતની જેમ, ચુંબકીય ક્ષેત્રની ફરતી સ્થિતિ વચ્ચે અનન્ય પત્રવ્યવહાર સુનિશ્ચિત કરવા માટે ચુંબકીય એન્કોડરમાં પરસ્પર લંબરૂપ વર્તમાન દિશાઓ સાથે બે (અથવા બે જોડી) હોલ ઇન્ડક્શન તત્વો પણ જરૂરી છે. અને આઉટપુટ વોલ્ટેજ (સંયોજન).
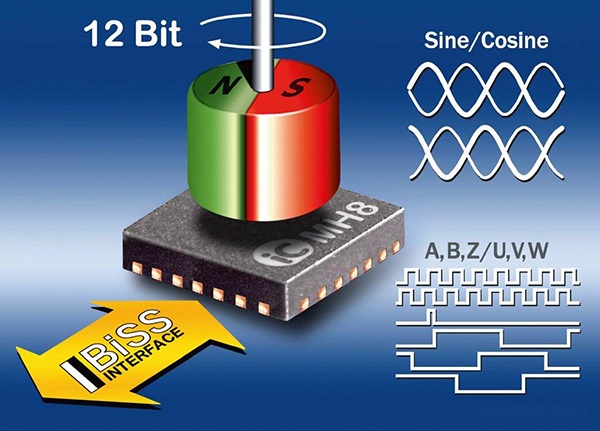
આજકાલ, ચુંબકીય એન્કોડર્સમાં ઉપયોગમાં લેવાતા હોલ સેન્સર્સ (ચિપ્સ) સામાન્ય રીતે ઉચ્ચ સ્તરના એકીકરણ ધરાવે છે, જે માત્ર હોલ સેમિકન્ડક્ટર ઘટકો અને સંબંધિત સિગ્નલ પ્રોસેસિંગ અને રેગ્યુલેશન સર્કિટને જ એકીકૃત કરતું નથી, પરંતુ સાઈન અને કોસાઈન એનાલોગ જેવા વિવિધ પ્રકારના સિગ્નલ આઉટપુટ મોડ્યુલોને પણ એકીકૃત કરે છે. સિગ્નલો, સ્ક્વેર વેવ ડિજિટલ લેવલ સિગ્નલ અથવા બસ કમ્યુનિકેશન આઉટપુટ યુનિટ.
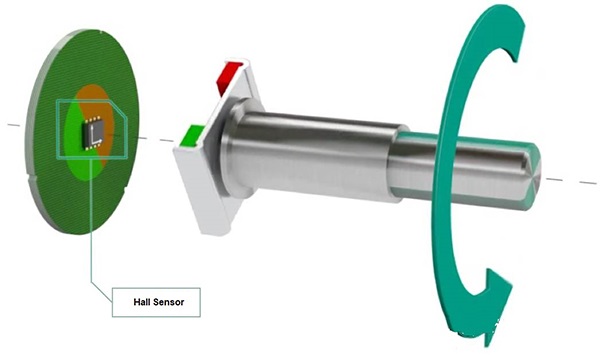
આ રીતે, એન્કોડર ફરતી શાફ્ટના અંતમાં ચુંબકીય ક્ષેત્ર ઉત્પન્ન કરે તેવા સિન્ટર્ડ નિયોડીમિયમ મેગ્નેટ જેવા કાયમી ચુંબકને ઇન્સ્ટોલ કરો, પીસીબી સર્કિટ બોર્ડ પર ઉપર જણાવેલ હોલ સેન્સર ચિપ મૂકો અને એન્કોડરના અંતે કાયમી ચુંબકનો સંપર્ક કરો. ચોક્કસ જરૂરિયાતો (દિશા અને અંતર) અનુસાર શાફ્ટ.
PCB સર્કિટ બોર્ડ દ્વારા હોલ સેન્સરમાંથી વોલ્ટેજ સિગ્નલ આઉટપુટનું વિશ્લેષણ કરીને, એન્કોડર રોટરની ફરતી સ્થિતિ ઓળખી શકાય છે.
ચુંબકીય એન્કોડનું માળખું અને કાર્ય સિદ્ધાંત આ કાયમી ચુંબક વિશેની વિશેષ આવશ્યકતા નક્કી કરે છે ઉદાહરણ તરીકે ચુંબક સામગ્રી, ચુંબક આકાર, ચુંબકીકરણ દિશા, વગેરે. સામાન્ય રીતેડાયમેટ્રિકલી મેગ્નેટાઇઝ્ડ નિયોડીમિયમ મેગ્નેટડિસ્ક શ્રેષ્ઠ મેગ્નેટ વિકલ્પ છે. નિંગબો હોરાઇઝન મેગ્નેટિક્સ ચુંબકીય એન્કોડ્સના ઘણા ઉત્પાદકોને કેટલાક કદ સાથે સપ્લાય કરવામાં અનુભવી છે.ડાયમેટ્રિકલ નિયોડીમિયમ ડિસ્ક મેગ્નેટ, D6x2.5mm અને D10x2.5mm ડાયમેટ્રિક ડિસ્ક નિયોડીમિયમ ચુંબક જેમાંથી સૌથી લોકપ્રિય મોડલ છે.
તે જોઈ શકાય છે કે પરંપરાગત ઓપ્ટિકલ એન્કોડરની તુલનામાં, ચુંબકીય એન્કોડરને જટિલ કોડ ડિસ્ક અને પ્રકાશ સ્રોતની જરૂર નથી, ઘટકોની સંખ્યા ઓછી છે, અને શોધ માળખું સરળ છે. તદુપરાંત, હોલ તત્વ પોતે પણ ઘણા ફાયદા ધરાવે છે, જેમ કે મક્કમ માળખું, નાનું કદ, ઓછું વજન, લાંબી સેવા જીવન, કંપન પ્રતિકાર, ધૂળ, તેલ, પાણીની વરાળ અને મીઠાના ધુમ્મસના પ્રદૂષણથી ડરતા નથી અથવા કાટની રાહ જોતા નથી.
જ્યારે ઇલેક્ટ્રિક મોટરના પરિભ્રમણ સ્થિતિ પ્રતિસાદ પર ચુંબકીય એન્કોડર તકનીક લાગુ કરવામાં આવે છે, ત્યારેsintered NdFeB ચુંબક સિલિન્ડરચુંબકીય એન્કોડર સીધા મોટર શાફ્ટના અંતમાં ઇન્સ્ટોલ કરી શકાય છે. આ રીતે, તે પરંપરાગત ફીડબેક એન્કોડરનો ઉપયોગ કરતી વખતે જરૂરી ટ્રાન્ઝિશનલ કપ્લીંગ બેરિંગ (અથવા કપલિંગ)ને દૂર કરી શકે છે અને કોન્ટેક્ટલેસ પોઝિશન મેઝરમેન્ટ હાંસલ કરી શકે છે, જે દરમિયાન યાંત્રિક શાફ્ટના કંપનને કારણે એન્કોડર નિષ્ફળતા (અથવા તો નુકસાન) થવાનું જોખમ ઘટાડે છે. ઇલેક્ટ્રિક મોટરનું સંચાલન. તેથી તે ઇલેક્ટ્રિક મોટર ઓપરેશનની સ્થિરતા સુધારવામાં મદદ કરે છે.
પોસ્ટ સમય: જુલાઈ-21-2022